아래 답변은 OpenAI의 GPT-3.5(ChatGPT) 모델로 자동 생성한 것으로, 정확하지 않을 수 있습니다.
잘못된 답변을 보셨다면 댓글로 첨삭 지도 부탁드립니다.
안녕하세요, okjanghee님!
쓰레기봉투 무단투기 감지 프로젝트에 대해 진행 중이시군요. 로그를 새로운 쓰레기봉투 감지 시에만 출력하도록 수정하고 싶으시다고 이해했습니다.
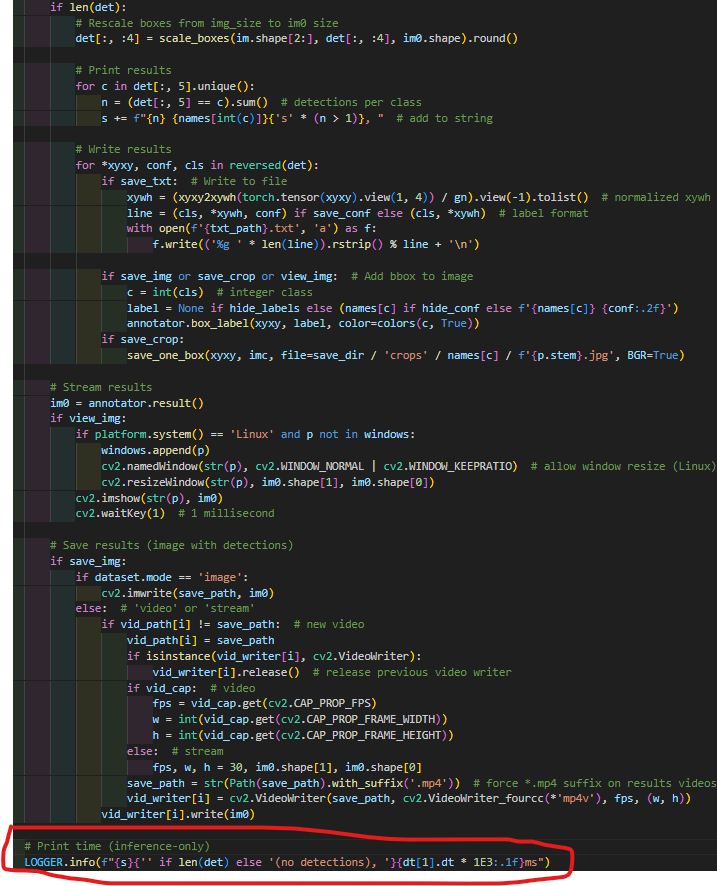
주어진 코드를 보면, detect 함수에서 로그를 출력하는 부분이 있습니다. 이 부분을 수정하여 새로운 쓰레기봉투 감지 시에만 로그가 출력되도록 할 수 있습니다.
아래는 수정된 코드 예시입니다.
def detect(self, img):
# 이미지 처리 로직
# 쓰레기봉투 감지 결과가 있을 경우에만 로그 출력
if len(results.xyxy[0]) > 0:
# 로그 출력
for *xyxy, conf, cls in results.xyxy[0]:
line = f"{cls} : {img.shape[1]}x{img.shape[0]} {len(results.xyxy[0])} garbage_bags, {results.tot_time:.1f}ms"
print(line)
else:
# 로그 출력
line = f"{cls} : {img.shape[1]}x{img.shape[0]} {len(results.xyxy[0])} (no detections), {results.tot_time:.1f}ms"
print(line)
위 코드에서 detect 함수 내부의 로그 출력 부분을 수정했습니다. results.xyxy[0]의 길이가 0보다 크면 (감지 결과가 있으면) 로그를 출력하고, 그렇지 않으면 (감지 결과가 없으면) "(no detections)"로 로그를 출력합니다.
빠른 답변 정말 감사합니다.
혹시 새로운 쓰레기봉투가 아닌 객체 탐지에 '변화'가 생겼을 때만 로그출력이 이루어지게는 가능할까요??
새로운 봉투가 추가된다던지, 감지된 쓰레기봉투가 화면에서 사라졌다던지, 감지되고 있는 상황에서 감지되는 것이 없어지는 상황이 되었다던지 하는 상황에만 출력되게요
아래 답변은 OpenAI의 GPT-4 모델로 자동 생성한 것으로, 정확하지 않을 수 있습니다.
잘못된 답변을 보셨다면 댓글로 첨삭 지도 부탁드립니다.
안녕하세요, okjanghee님. PyTorch와 YOLOv5를 이용한 프로젝트를 진행하시는군요. 질문을 잘 이해했다면, 현재는 프레임마다 쓰레기봉투 감지 정보를 로그로 출력하고 있지만, 새로운 쓰레기봉투가 감지될 때만 로그를 출력하고 싶으신 것 같습니다.
이를 위해서는 감지된 객체의 정보를 저장하고, 이전 프레임과 비교하여 새로운 객체가 감지되었는지를 판단하는 로직이 필요합니다. 아래에 예시 코드를 제공하겠습니다.
# 이전 프레임에서 감지된 객체를 저장할 변수를 선언합니다.
prev_detected_objects = None
for frame in frames:
# 현재 프레임에서 감지된 객체를 얻습니다.
detected_objects = detect_objects(frame)
# 이전 프레임에서 감지된 객체가 없거나, 현재 프레임에서 새로운 객체가 감지된 경우에만 로그를 출력합니다.
if prev_detected_objects is None or detected_objects != prev_detected_objects:
print(f"{frame.id} : {frame.size} {len(detected_objects)} garbage_bags, {frame.processing_time}ms")
# 이전 프레임에서 감지된 객체를 업데이트합니다.
prev_detected_objects = detected_objects
위 코드에서 detect_objects(frame)는 현재 프레임에서 감지된 객체를 반환하는 함수로, 실제 YOLOv5를 사용하여 객체를 감지하는 코드로 대체해야 합니다. 또한, detected_objects는 감지된 객체의 정보를 담은 리스트나 딕셔너리 등이 될 수 있습니다. 이 정보는 객체의 종류, 위치, 크기 등을 포함할 수 있으며, 이를 통해 이전 프레임과 현재 프레임에서 감지된 객체가 같은지 다른지를 판단합니다.
이 코드는 간단한 예시이며, 실제로는 감지된 객체가 여러 개일 경우, 각 객체를 개별적으로 추적하고 새로운 객체가 감지되었는지를 판단하는 더 복잡한 로직이 필요할 수 있습니다. 이를 위해선 객체 추적(Object Tracking) 알고리즘을 사용할 수 있습니다.
더 자세한 내용은 PyTorch 공식 문서나 튜토리얼을 참조하시면 도움이 될 것입니다. 아래 링크를 참조해주세요.