- 아래 답변은 OpenAI의 GPT-3.5(ChatGPT) 모델로 자동 생성한 것으로, 정확하지 않을 수 있습니다.
- 잘못된 답변을 보셨다면 댓글로 첨삭 지도 부탁드립니다.

안녕하세요 Minwoo_Ju님,
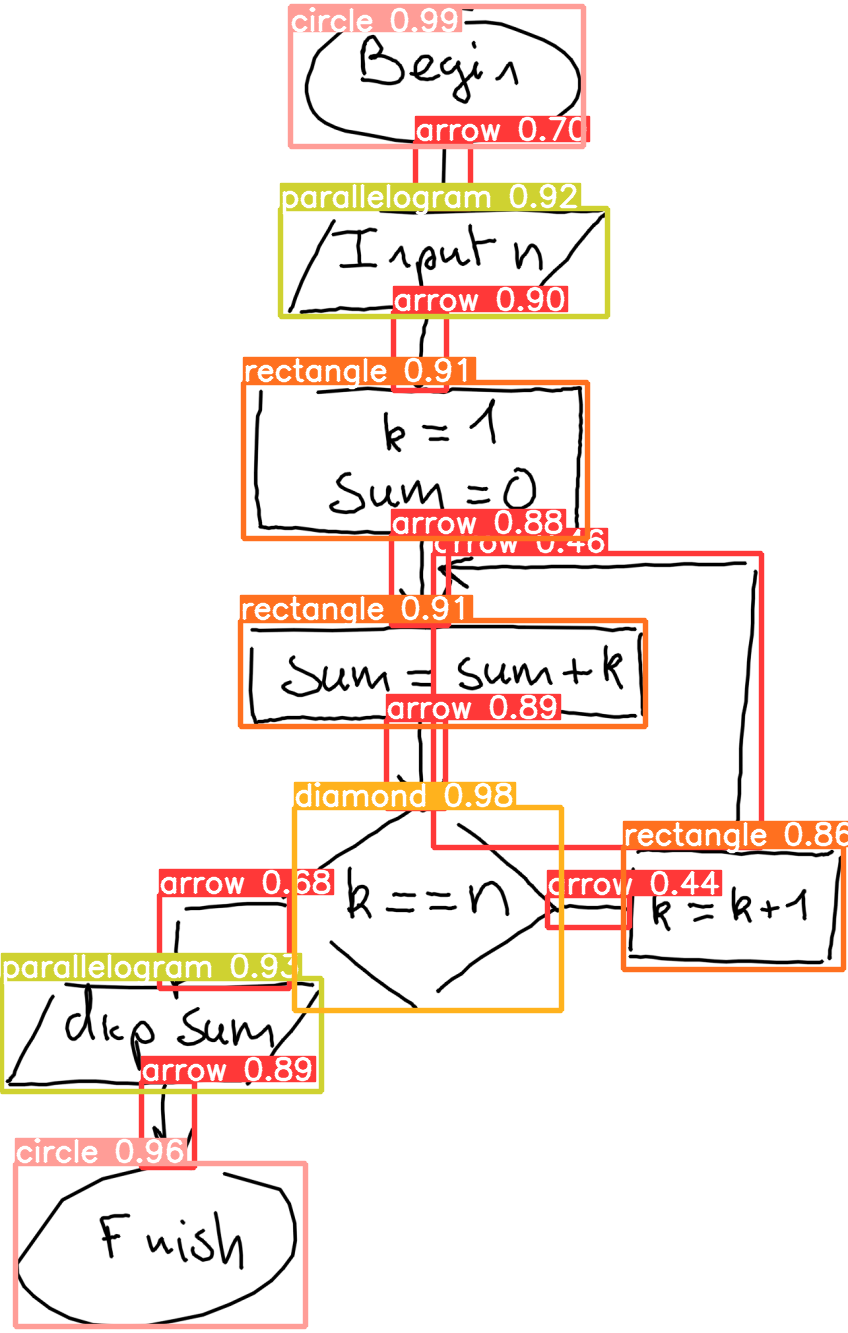
손으로 그린 다이어그램의 화살표가 가리키는 것을 학습시키는 방법에 대해 궁금하신 것 같습니다. 또한, 이미지 내 객체 인식에는 yolov8을 사용하여 성공하셨다고 합니다.
화살표가 이어주는 도형이 무엇인지 학습시키고 싶으시다면, 객체 감지 모델을 사용하여 화살표와 이어주는 도형을 인식하고, 이를 학습시키는 방법을 고민하고 계신 것 같습니다. 하지만, 기존의 객체 감지나 이미지 분할 기법으로는 화살표와 이어주는 도형을 직접 학습시키는 것은 어려울 수 있습니다.
이러한 경우에는 다른 방법을 고려해볼 수 있습니다. 예를 들어, 화살표와 이어주는 도형의 관계를 학습시킬 수 있는 데이터셋을 수집하고, 이를 기반으로 모델을 학습시킬 수 있습니다. 데이터셋을 구성할 때는 화살표와 이어주는 도형의 관계를 명확하게 표현하는 레이블을 추가해야 합니다. 예를 들어, "arrow1: from a to b"와 같은 형식으로 레이블을 지정할 수 있습니다.
이후에는 이러한 데이터셋을 사용하여 모델을 학습시킬 수 있습니다. 예를 들어, PyTorch의 torchvision 패키지를 사용하여 데이터셋을 로드하고, 모델을 정의하고, 손실 함수를 정의한 후에 학습을 진행할 수 있습니다. 학습된 모델은 화살표와 이어주는 도형의 관계를 예측할 수 있게 될 것입니다.
아래는 예시 코드입니다. 이 코드는 torchvision 패키지의 CIFAR-10 데이터셋을 사용하여 모델을 학습시키는 예시입니다. 이 코드를 참고하여 데이터셋과 모델을 적절히 수정하여 화살표와 이어주는 도형의 관계를 학습시킬 수 있습니다.
import torch
import torch.nn as nn
import torch.optim as optim
import torchvision
import torchvision.transforms as transforms
# 데이터셋 로드
transform = transforms.Compose(
[transforms.ToTensor(),
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))])
trainset = torchvision.datasets.CIFAR10(root='./data', train=True,
download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4,
shuffle=True, num_workers=2)
# 모델 정의
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1 = nn.Conv2d(3, 6, 5)
self.pool = nn.MaxPool2d(2, 2)
self.conv2 = nn.Conv2d(6, 16, 5)
self.fc1 = nn.Linear(16 * 5 * 5, 120)
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10)
def forward(self, x):
x = self.pool(F.relu(self.conv1(x)))
x = self.pool(F.relu(self.conv2(x)))
x = x.view(-1, 16 * 5 * 5)
x = F.relu(self.fc1(x))
x = F.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
# 손실 함수와 최적화 함수 정의
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
# 모델 학습
for epoch in range(2): # 데이터셋을 여러 번 반복합니다.
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
# 입력 데이터 가져오기
inputs, labels = data
# 변화도(Gradient) 매개변수를 0으로 만들고
optimizer.zero_grad()
# 순전파 + 역전파 + 최적화
outputs = net(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
# 통계 출력
running_loss += loss.item()
if i % 2000 == 1999: # 미니배치 단위로 누적 손실 출력
print('[%d, %5d] loss: %.3f' %
(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.0
print('학습이 완료되었습니다.')
이 코드는 CIFAR-10 데이터셋을 사용하여 모델을 학습시키는 예시입니다. 화살표와 이어주는 도형의 관계를 학습시키기 위해서는 이 코드를 수정하여 데이터셋을 구성하고, 모델을 정의해야 합니다.
더 자세한 내용은 PyTorch 공식 튜토리얼(Welcome to PyTorch Tutorials — PyTorch Tutorials 2.6.0+cu124 documentation)을 참고하시면 도움이 될 것입니다. 특히, "PyTorch로 시작하기"와 "전이 학습 튜토리얼"을 참고하시면 객체 감지와 관련된 내용을 더 자세히 알 수 있습니다.
이 답변이 도움이 되었는지 확인해주세요. 추가로 궁금한 점이 있다면 언제든지 질문해주세요. 감사합니다!
- 답변이 어떠셨나요? 괜찮았다고 생각하신다면 아래
 를 한 번 눌러주시길 부탁드려요!
를 한 번 눌러주시길 부탁드려요!