
NVIDIA Isaac GR00T N1 소개
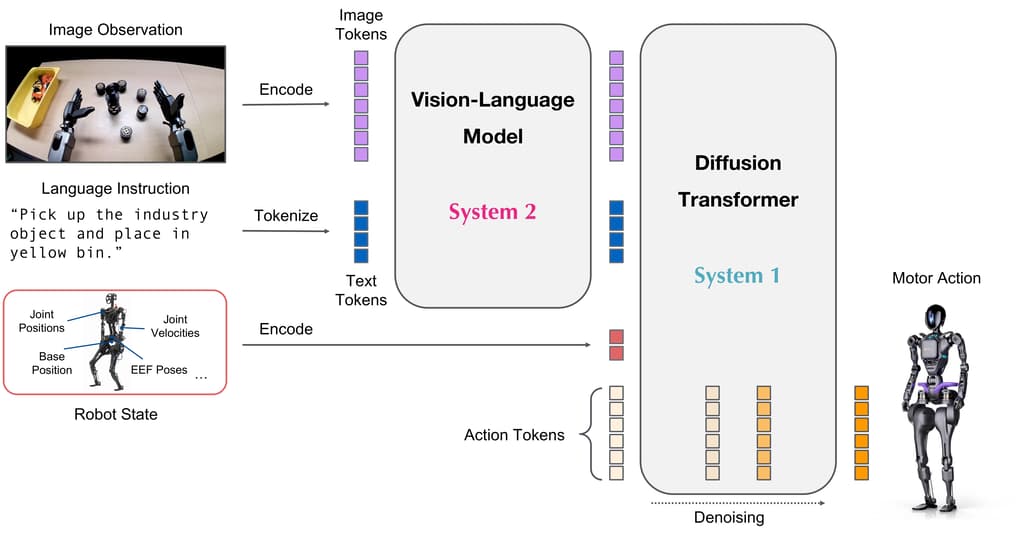
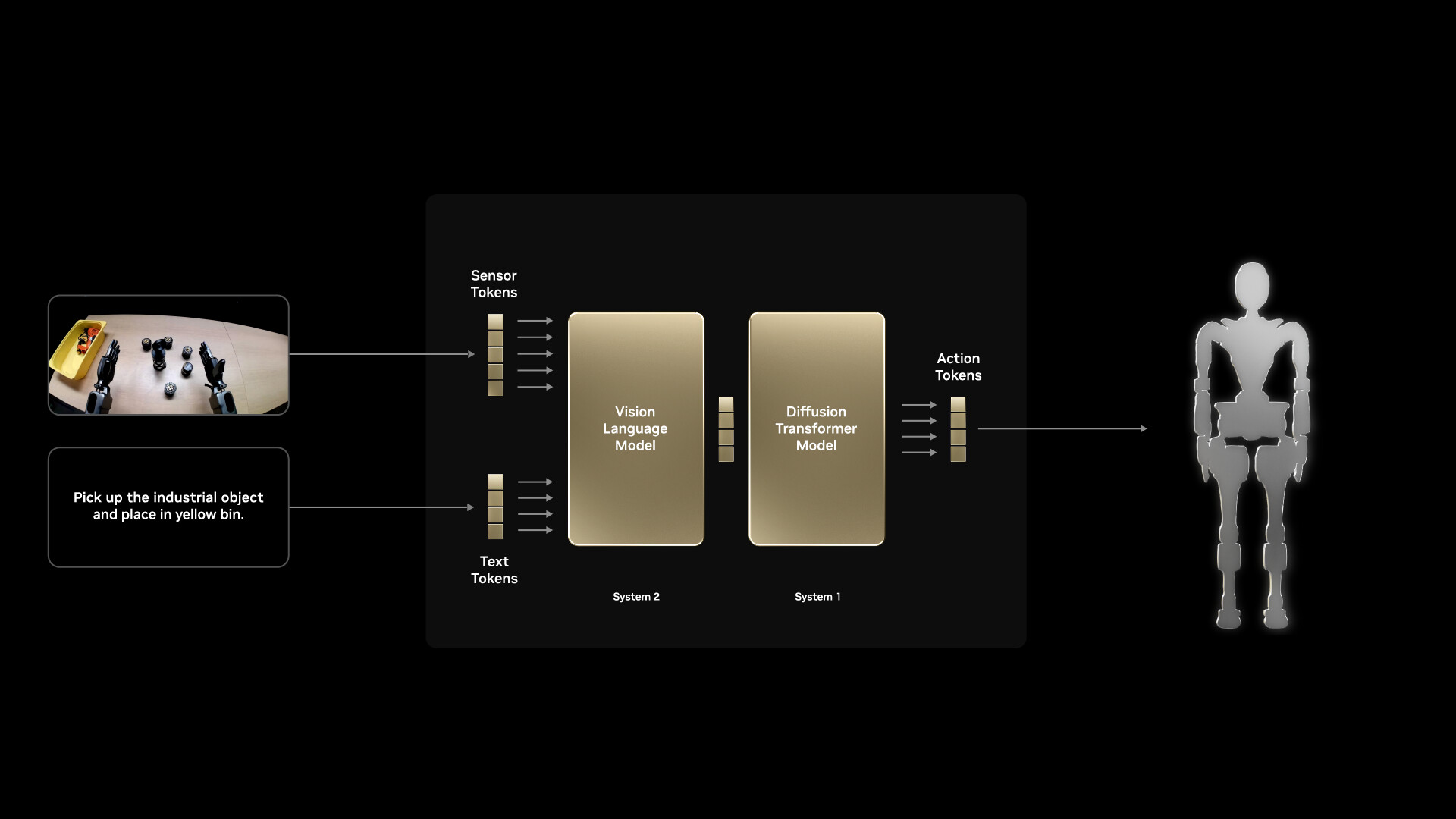
NVIDIA가 오픈소스 기반 휴머노이드 로봇용 AI 모델 Isaac GR00T N1을 공개했습니다. 이 모델은 멀티모달 입력(언어 + 이미지)을 통해 다양한 환경에서 로봇 조작을 수행할 수 있도록 설계되었습니다. 특히, 실제 로봇 데이터, 시뮬레이션 데이터, 그리고 대규모 인터넷 비디오 데이터로 학습되었으며, 사용자 맞춤형 파인튜닝이 가능합니다.

Isaac GR00T N1은 범용 휴머노이드 로봇을 위한 최초의 오픈소스 기반 파운데이션 모델로, 모델의 핵심 기능은 다양한 환경에서 로봇 조작을 수행할 수 있도록 하는 것입니다. 즉, 로봇이 시각 및 언어 정보를 기반으로 사물을 조작하는 능력을 갖도록 학습되었습니다. 특히, NVIDIA의 Isaac GR00T Blueprint를 활용하여 생성된 신경망 기반 데이터와 인터넷에서 수집된 대규모 비디오 데이터를 학습한 것이 특징입니다.

또한, GR00T N1은 단순한 모델이 아니라, 다양한 로봇의 하드웨어 구조에 적응할 수 있도록 설계되었습니다. 즉, 연구자들은 특정한 로봇의 동작 패턴을 모델에 추가 학습시켜 맞춤형 로봇 제어 시스템을 구축할 수 있습니다. 이를 통해 로봇이 특정한 작업을 수행할 수 있도록 최적화하는 것이 가능합니다.
GR00T 워크플로우
GR00T Workflows는 NVIDIA Isaac GR00T의 일부로,
로봇이 인간과 유사한 방식으로 학습하고 조작할 수 있도록 돕는 핵심 AI 모델 및 훈련 방법론입니다. 이 워크플로우는 휴머노이드 로봇 개발을 가속화하고, 시뮬레이션과 현실 세계 간의 격차(Sim2Real Gap)를 해소하기 위해 설계되었습니다.
GR00T 플랫폼을 활용하면 고품질의 로봇 행동 데이터를 생성하고, 로봇이 다양한 환경에서 적응할 수 있도록 학습할 수 있습니다. GR00T Workflows를 활용하여 연구자와 개발자들은 고품질의 로봇 시뮬레이션 데이터 생성, 모방 학습, 강화 학습 등을 통해 더욱 정교한 로봇 행동을 설계할 수 있습니다.
GR00T-Teleop: 원격 조작을 통한 인간 데이터 수집
-
고품질의 인간 시연 데이터(Human Demonstration) 수집
-
원격 조작(텔레오퍼레이션, Teleoperation)을 활용하여 로봇 행동 데이터 생성
-
예시: 원격 조작을 통해 로봇이 정밀한 조작을 학습하도록 훈련
GR00T-Mimic: 대규모 합성 모션 데이터 생성
-
소량의 인간 시연 데이터만으로 대규모 로봇 모션 데이터 생성 가능
-
시뮬레이션 기반 데이터 증강을 활용하여 로봇의 행동 패턴을 확장
-
예시: 사람의 동작 몇 개만으로 로봇이 수천 개의 조작 동작을 학습
GR00T-Gen: 환경 변화에 적응하는 로봇 학습
-
다양한 환경에서 로봇이 스스로 적응하도록 학습
-
강화 학습(Deep RL) + 시뮬레이션 학습을 결합하여 일반화 성능 향상
-
예시: 로봇이 새로운 작업 환경에서도 적응할 수 있도록 학습
GR00T-Dexterity: 정밀한 물체 조작 능력 강화
-
픽셀 → 행동(Pixels-to-Action) 방식을 통해 섬세한 조작 가능
-
물체를 쥐고, 돌리고, 조작하는 등의 정밀한 행동 학습
-
예시: 로봇이 컵을 집고 다른 곳으로 옮기는 동작을 수행
GR00T-Mobility: 로봇의 이동 능력 강화
-
새로운 환경에서도 빠르게 적응할 수 있도록 이동 학습
-
강화 학습과 모방 학습을 결합하여 효율적인 이동 경로 생성
-
예시: 로봇이 장애물이 있는 환경에서도 최적의 이동 경로를 찾도록 학습
GR00T-Control: 정밀한 로봇 제어
-
로봇의 전체적인 움직임을 최적화하는 제어 알고리즘 제공
-
휴머노이드 로봇의 복잡한 동작을 실시간으로 조정 가능
-
예시: 로봇이 다리 균형을 잡고 계단을 오르는 등의 동작을 수행
GR00T-Perception: 시각 및 인지 능력 향상
-
Vision-Language 모델(VLM) 및 LLM 기반의 강화된 인식 시스템
-
검색 기반 메모리(Retrieval-Augmented Memory, RAG) 적용
-
예시: 로봇이 카메라를 통해 사물을 인식하고, 필요한 행동을 결정
라이선스
Isaac GR00T 프로젝트는 Apache 2.0 License로 공개 및 배포되고 있습니다.
 Isaac GR00T 홈페이지
Isaac GR00T 홈페이지
 Isaac GR00T GitHub 저장소
Isaac GR00T GitHub 저장소
https://github.com/NVIDIA/Isaac-GR00T
 Isaac GR00T N1 논문
Isaac GR00T N1 논문
 GR00T-N1-2B 모델
GR00T-N1-2B 모델
이 글은 GPT 모델로 정리한 글을 바탕으로 한 것으로, 원문의 내용 또는 의도와 다르게 정리된 내용이 있을 수 있습니다. 관심있는 내용이시라면 원문도 함께 참고해주세요! 읽으시면서 어색하거나 잘못된 내용을 발견하시면 덧글로 알려주시기를 부탁드립니다. ![]()
![]() 파이토치 한국 사용자 모임
파이토치 한국 사용자 모임![]() 이 정리한 이 글이 유용하셨나요? 회원으로 가입하시면 주요 글들을 이메일
이 정리한 이 글이 유용하셨나요? 회원으로 가입하시면 주요 글들을 이메일![]() 로 보내드립니다! (기본은 Weekly지만 Daily로 변경도 가능합니다.)
로 보내드립니다! (기본은 Weekly지만 Daily로 변경도 가능합니다.)
![]() 아래
아래![]() 쪽에 좋아요
쪽에 좋아요![]() 를 눌러주시면 새로운 소식들을 정리하고 공유하는데 힘이 됩니다~
를 눌러주시면 새로운 소식들을 정리하고 공유하는데 힘이 됩니다~ ![]()